Notre gamme de robots industriels à grande vitesse, à la pointe de la technologie, comprend des robots à forte capacité, à portée étendue, des robots 7 axes extrêmement agiles, ou encore des robots double bras à 15 axes.
Série HC
HC10DTFP
Le cobot idéal pour les environnements sensibles

Vue d'ensemble
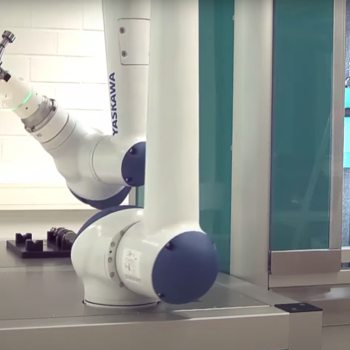
Le MOTOMAN HC10DTFP est un robot 6 axes adapté aux applications collaboratives avec une charge utile allant jusqu'à 10 kg. Il offre une plage de travail (du centre de rotation de l'axe S/L au centre de rotation de l'axe R/T) de 1 379 mm et une portée effective (du centre de rotation de l'axe S/L au point P) de 1 200 mm.
Le MOTOMAN HC10DTFP possède un revêtement de surface résistant aux produits chimiques et liquides de nettoyage. Conforme à la norme EN 60529-IP67, il peut être utilisé dans des environnements de travail difficiles car il est étanche à la poussière et l'eau. De plus, l’indice de protection IP67, garantissant une graisse de qualité alimentaire, et la certification « ISO cleanroom class 5 » permettent à ces robots d'être utilisés dans des applications liées à l'alimentation, ainsi que pour des applications scientifiques.
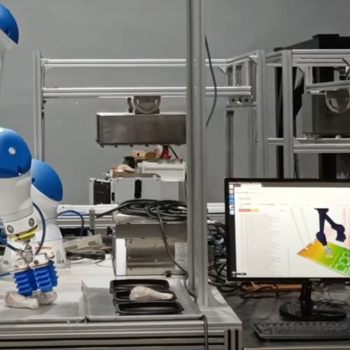
Le MOTOMAN HC10DTFP peut être commandé et programmé à l'aide du guidage manuel, du boîtier de programmation standard « Teach Pendant » ou bien encore du boîtier « Smart Pendant » de type tablette tactile. Pour simplifier la programmation grâce au guidage manuel, le robot dispose d’une boîte à boutons installée au poignet du robot pouvant être utilisés pour enregistrer en instantané les positions, sans avoir à les confirmer sur le boîtier de programmation. Cela réduit les temps de programmation et permet aux intégrateurs de systèmes professionnels comme aux débutants d’en bénéficier. Plusieurs fonctions de sécurité permettent une collaboration Homme-Robot optimale, telles que le dégagement automatique lors d'une situation de serrage ou le simple fait de repousser le robot avec reprise du mouvement (fonction « pushback »).
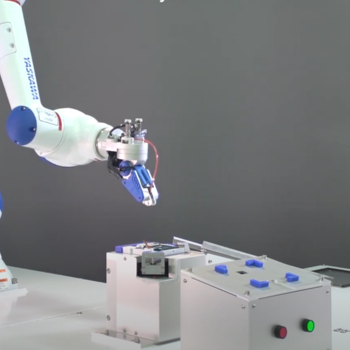
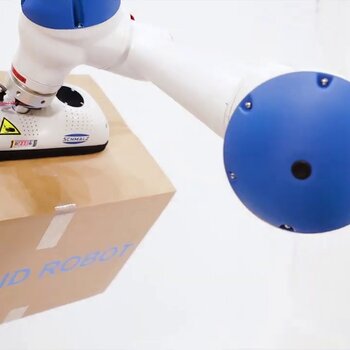
Le MOTOMAN HC10DTFP peut fonctionner en mode hybride et alterner en toute sécurité entre un fonctionnement collaboratif et un fonctionnement à pleine puissance. Grâce à ce mode de fonctionnement mixte, il peut atteindre de très bons temps de cycle. Pour l'alimentation des pinces ou des outils le robot dispose d’un faisceau interne préacheminé dans le bras du robot, afin d’éviter l'utilisation des câbles externes encombrants et afin de faciliter l’intégration et la flexibilité du robot.
Le HC10DTFP peut être fourni avec le contrôleur de robot YRC1000 ou bien avec le contrôleur compact YRC1000micro.


Détails techniques
- Nombre d'axes
- 6
- Charge admissible
- 10 kg
- Plage de travail
- 1379 mm
- Répétabilité
- 0.05 mm
- Poids
- 58 kg
- Alimentation électrique
- 1 kVA
- Maximum Speed S Axis
- 130 °/s
- Maximum Speed L Axis
- 130 °/s
- Maximum Speed U Axis
- 180 °/s
- Maximum Speed R Axis
- 180 °/s
- Maximum Speed B Axis
- 250 °/s
- Maximum Speed T Axis
- 250 °/s
- Options de montage
- x Non
- Autres spécifications
- x Non
Téléchargements
| Nom | |||
| HC10DTFP 2D CAD/CAE | | CAD/CAE | ||
| HC10DTFP 3D CAD/CAE | | CAD/CAE | ||
|
Flyer Cobot HC10DTFP
Human-Collaborative Robot for sensitive Environments Fiche technique | anglais |
Fiche technique | anglais | |
|
Flyer Cobot HC10DTFP
Human-Collaborative-Roboter für sensitive Umgebungen Fiche technique | allemand |
Fiche technique | allemand | |
|
Flyer Cobot HC10DTFP
Robot collaboratif pour les environnements sensibles Fiche technique | français |
Fiche technique | français | |
| Assistenzroboter_Kollaborative Applikationen Brochures | allemand | Brochures | allemand | |
| Robot Assistants_Collaborative Applications Brochures | anglais | Brochures | anglais | |
|
Flyer Cobot HC10DTFP
Robot colaborativo para entornos sensibles Fiche technique | espagnol |
Fiche technique | espagnol |