Notre gamme de robots industriels à grande vitesse, à la pointe de la technologie, compte plus d'une centaine de modèles pour répondre à tout type d'application. Elle comprend des robots spécifiques à forte capacité, à portée étendue, des robots 7 axes extrêmement agiles, des robots double bras à 15 axes ou encore des cobots.
Instructions intégrateurs
Retrouvez sur cette page les différentes instructions et étapes pour vous aider à dimensionner votre robot MOTOMAN.
1. Choix du robot
2. Fixation du robot au sol
3. Fixation et câblage du préhenseur
4. Alimentation électrique
5. Câblage du contrôleur
6. Positionnement des barrières immatérielles et scrutateurs laser
7. Vérification à la mise sous tension
1. Choix du robot
Le choix d’un robot se fait suivant 3 critères :
- Le rayon d’action
- La charge embarquée
- Le temps de cycle
A. L’accessibilité
Le rayon d’action est calculé par rapport au point P situé au centre du poignet du robot (5ième axe du robot).
Retrouvez ces informations dans le chapitre 6.3 de la documentation de chaque robot.
L’exemple ci-dessous provient du manuel du GP180.
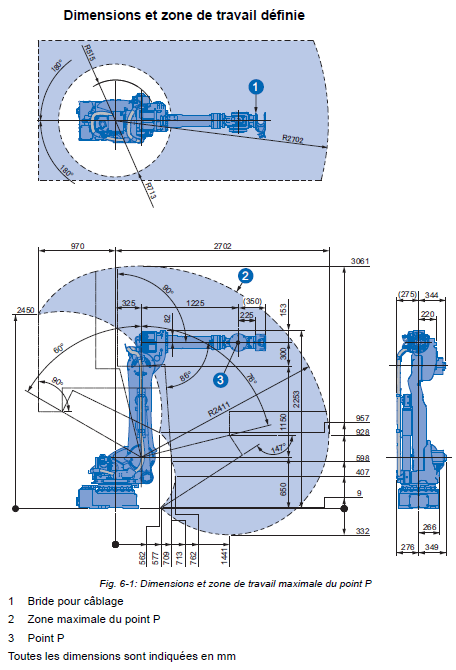
Ce schéma est une première approche en matière d’accessibilité du robot.
Pour tester l’implantation complète de votre îlot, vous pouvez utiliser notre logiciel de simulation MotoSim EG-VRC, disponible en version d’évaluation : https://software.yaskawa.eu.com/
B. Charge embarquée
La charge maximale que peut déplacer le robot est indiquée dans le chapitre 7.1 de la documentation de chaque robot.
Le centre de gravité de la charge (préhenseur + charge) doit se trouver à l’intérieur de la cloche.
Attention, l’origine de la cloche de charge est située au centre du poignet du robot (point P).
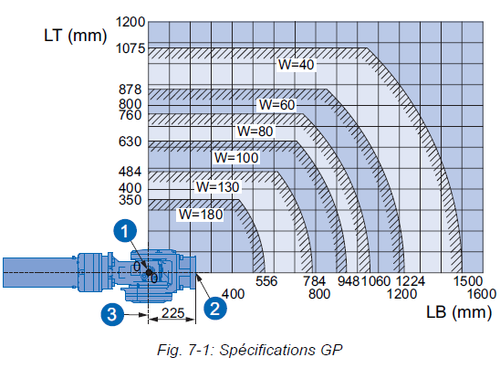
Dans le cas de charges déportées ou volumineuses, il est nécessaire de vérifier que les couples statiques et les moments d’inerties ne dépassent pas le maximum autorisé.
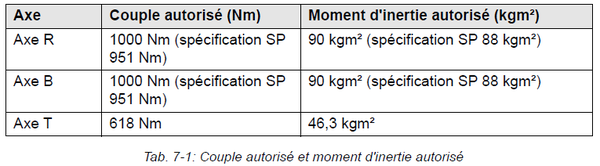
Un outil en ligne, nécessitant un compte utilisateur, permet de faciliter la validation de la charge embarquée.
Pour plus d’informations, consultez la fiche application 35 « Utilisation de MotoSize ».
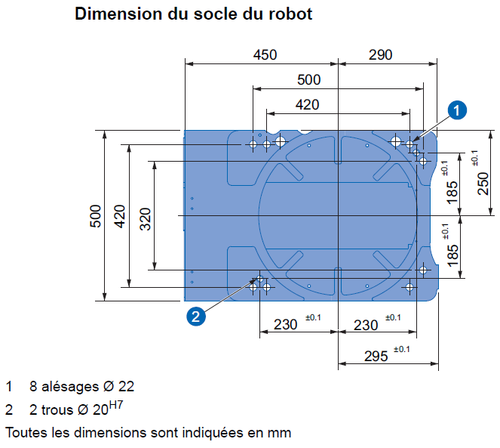
2. Fixation du robot au sol
Les dimensions du socle du robot sont données dans le chapitre 6.2 de la documentation du robot.
Il est conseillé de toujours fixer le robot sur une chaise ou sur une plaque au sol, afin que celui-ci soit installé sur une surface plane.
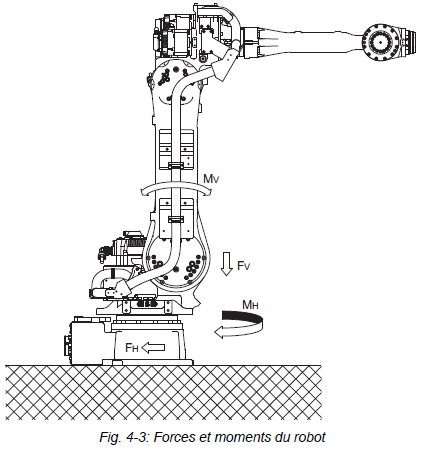
Le dimensionnement du support du robot (béton, plaque de support et réhausse) se base sur les forces et couples maximums exercés par le robot sur sa base.
Ces valeurs sont données dans la partie 4.3 du manuel du robot.
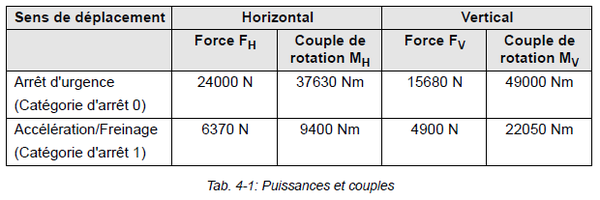
3. Fixation et câblage du préhenseur
Les dimensions de la bride du robot sont données dans le chapitre 7.2 de la documentation du robot.
A- Emplacement équipement additionnel
Plusieurs emplacements sur le robot permettent d’ajouter un équipement (périphérique, coffret électrique, …).
Ces emplacements sont décrits dans la partie 8.2 de la documentation du robot.
B- Utilisation des faisceaux internes
Les robots sont tous équipés d’un ou plusieurs faisceaux électriques et d’un ou plusieurs faisceaux pneumatiques.
Les caractéristiques de ces faisceaux sont données dans le chapitre 8.3 de la documentation du robot.
4. Alimentation électrique
A- Vérification du régime de neutre
Le contrôleur du robot peut être alimenté sous les régimes de neutre TT, TN-C et TN-S. L’utilisation d’un robot avec un régime de neutre IT nécessite l’ajout d’un transformateur d’isolement non fourni avec le contrôleur du robot.
B- Dimensionnement du disjoncteur
Le dimensionnement du disjoncteur dépend de la puissance absorbée par le robot.
Cette puissance est donnée dans le chapitre 6 du manuel du robot et est également rappelée dans le manuel d’installation et de câblage du contrôleur.
Cette documentation comporte également la dimension recommandée du disjoncteur. Il est conseillé de sélectionner un disjoncteur courbe D. Dans le cas d’un disjoncteur différentiel, il est conseillé de sélectionner un différentiel de type A SI (Super Immunisé) d’une valeur de 300mA.
5. Câblage du contrôleur
A- Positionnement du contrôleur
La mise en place du contrôleur nécessite de vérifier les recommandations données dans le chapitre 4.2 du manuel d’installation et de câblage de la YRC1000.
L’objectif est d’assurer un espace suffisant autour de celui-ci pour garantir une bonne aération.
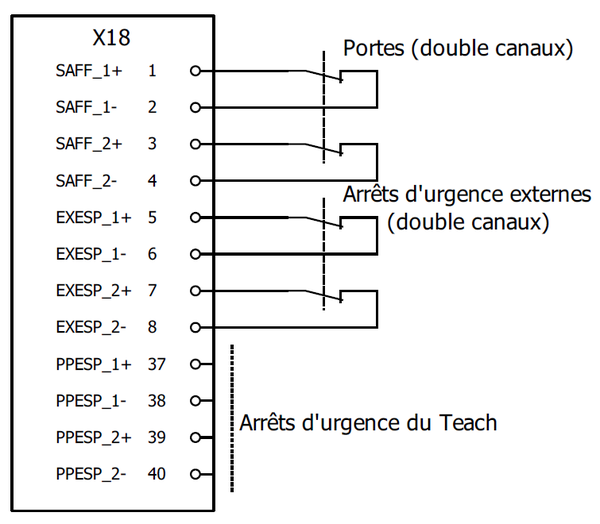
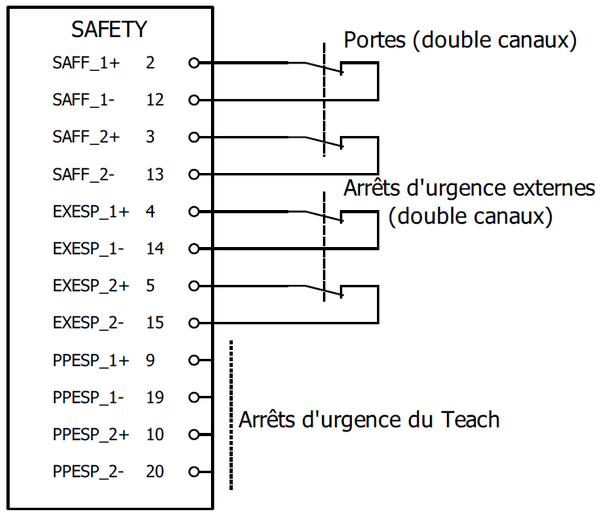
B- Câblage des portes et des arrêts d’urgence
Tous les signaux de sécurité se situent sur le bornier X18, dans le cas du contrôleur YRC1000, placé généralement sur la porte de celui-ci.
Dans le cas du contrôleur YRC1000micro, un bornier commun aux entrées/sorties et à la sécurité est généralement fourni avec le contrôleur (nommé "Terminal Kit"). La notation des signaux reste la même que le contrôleur YRC1000.
C- Câblage des E/S
Schéma de câblage des E/S pour le contrôleur YRC1000.
Remarque : l’intensité maximale des sorties est de 50mA pour les borniers CN306, CN308 et CN309. Les sorties du CN307 sont relayées et supportent au maximum 500mA.
Schéma de câblage des E/S pour le contrôleur YRC1000micro.
Toutes les sorties du contrôleur YRC1000micro supportent 100mA.
6. Positionnement des barrières immatérielles et scrutateurs laser
La distance minimale entre une barrière immatérielle ou un scrutateur laser et la zone de travail d’un robot est définie selon la norme ISO 13855. Celle-ci nécessite de connaitre le temps d'arrêt par inertie du robot.
Une ouverture de porte provoquant un arrêt de catégorie 1, les courbes d'arrêt pour cette catégorie sont données au chapitre 6.4 de la documentation du robot. Pour déterminer le temps d'arrêt dans le cas le plus défavorable, il faut sélectionner la courbe terminant avec le point le plus haut.
Par exemple, pour un robot GP12, le point le plus haut est donné sur le graphique de l'axe S, pour une déviation de 100% (bras robot totalement tendu) et une charge de 33% du maximum (4 Kg).

Le temps d'arrêt maximum d'un GP12 dans le cas le plus défavorable est donc de 0,63s.
A cette valeur, il faudra ajouter le temps de réaction du système de sécurité du robot qui est de 20ms.
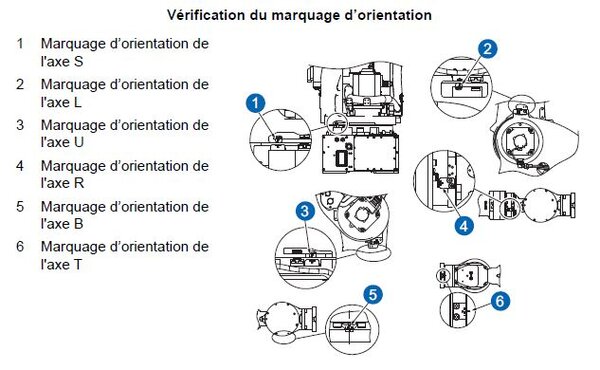
7. Vérification de la mise sous tension
Pour réaliser la mise sous tension, il est nécessaire d'amener le robot en position 0 à l’aide du menu "SECOND HOME POSITION" et de vérifier les marquages d’orientation.
L’emplacement des marquages se trouve dans le chapitre 10.3 de la documentation du robot.